|
|

|

|
| e-Pub |
Section: New Results
Dynamic Change Prediction and Situation Awareness
Vision-based Lane Tracker
Participants : Mathias Perrollaz, Amaury Nègre.
In the field of vehicle risk assessment system, vehicle to road localization is an essential information to predict drivers behaviors as well as collision risk evaluation. To achieve this task, we have developed a vision based lane tracker to estimate the geometry of the lane using the line markers. Previous development was based on a Monte-Carlo particle filter to estimate simultaneously the road plane orientation, the lane curvature and the camera position. To perform the particle evaluation, the algorithm first process a ridge extraction of the camera image and then projected the left and right marker line represented by the particle on the ridge image.
The first improvement of the tracker consists on dynamically adapting the scale of the ridge filter to improve the efficiency and the precision of the particle evaluation. The second improvement is capability the perform multi-lane tracking for example in highway environment. To solve this problem, the position of the lane is added to the state and the particle evaluation consider the total number of line marker (a-priori known). Figure 5 shows the results of the lane tracker program on a highway environment.
|
||||
|
Vision-based Lane Change Prediction
Participants : Suryansh Kumar, Dizan Vasquez, Mathias Perrollaz, Stephanie Lefevre, Amaury Nègre, Maiwen Gault.
For both Advanced Driving Assistance Systems and Autonomous Vehicles, it is very important to have the capability of predicting and understanding the driver's behavior. This work addresses this subject in a bottom-up fashion by first detecting low-level “atomic” maneuvers which can be used as a building block for more complex behavior. Concretely, we have developed a learning-based approach that uses lane tracking data to predict lane changes.
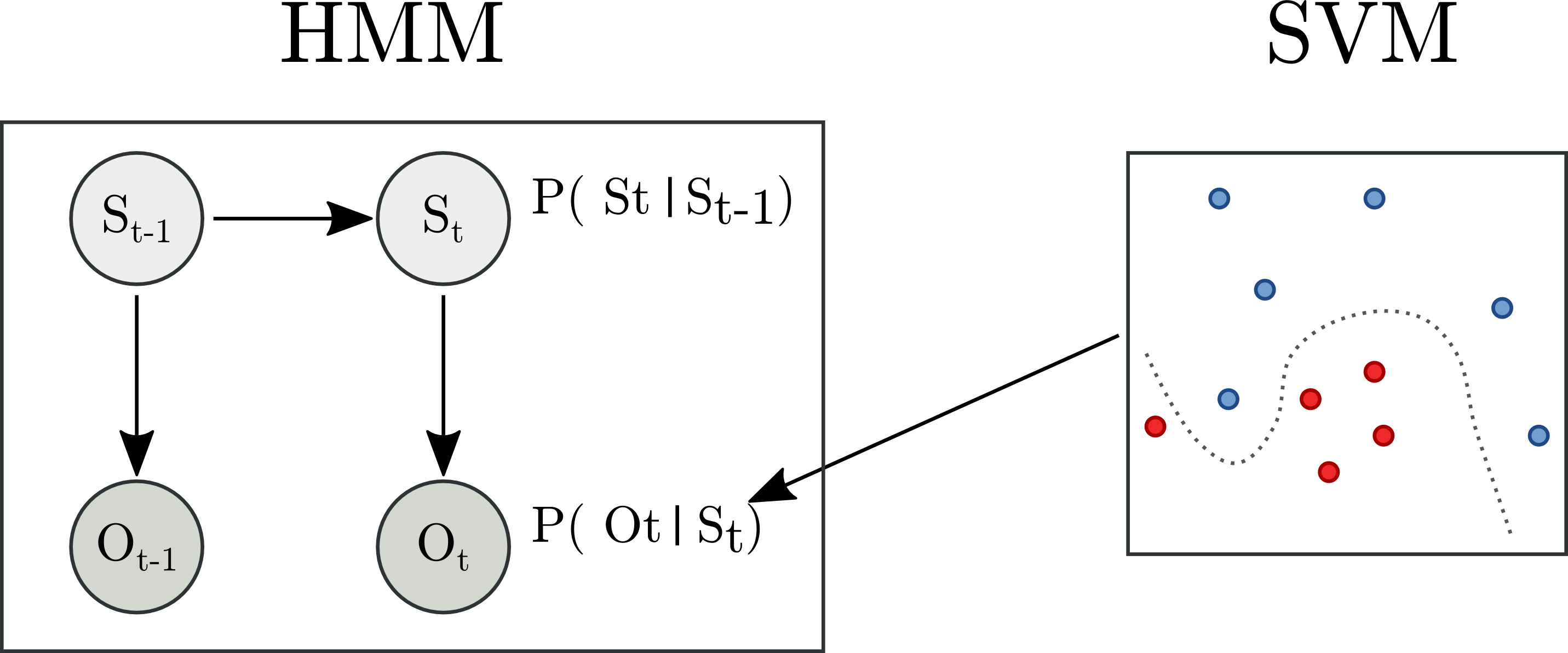
Most works in the literature address this as a classification problem, and often use some version of Support Vector Machines (SVM) to solve it. The problem with this approach is that it is sensitive to noise and can yield high-frequency oscillations in the obtained predictions, moreover, they do not provide any information concerning the Time To Change (TTC). Other approaches use a filtering approaches, using Hidden Markov Models (HMM), for example. Although they produce smoother predictions and, in some cases, even a TTC estimate, some studies [33] suggest that HMM-based approaches are less accurate than those based on SVMs.
Our work combines the advantages of both approaches in a hierarchical fashion. First, lane tracking data (i.e. lane-relative yaw, lane-relative lateral position and their fist-order derivatives) are used as an input of a multi-class SVM. Then, the Bradley-Terry model is used to translate the SVM output into a probability which is used as the observation model of a Bayesian filter (Fig. 6 ).
This work has been published in the Intelligent Vehicles conference [18] . Since then, we have worked on an improved HMM-only approach which addresses the shortcomings of similar approaches by using a continuous observation model. In our preliminary experiments, this approach leads to improved predictions over the hybrid one.
Feature-based human behavior modeling
Participants : Suryansh Kumar, Yufeng Yu, Dizan Vasquez.
When it comes to modeling and learning complex human behavior, the preferred approach in the literature is to try to learn the typical motion patterns that people or vehicles get engaged into in a given environment. This has, however, a major drawback: the learned patterns only apply to the environment where they have been learned. This means that, for a new environment, previous knowledge cannot be used and patterns should be learned from scratch.
This situation has been recently addressed [49] by a family of approaches which rely on two complementary hypotheses:
-
Agents behave like planners. The idea is that when people or other intelligent agents move around, they plan in order to minimize a cost function. Thus, if this function is known, it fully determines the agent's behavior.
-
The cost is a function of local features. This extends the previous hypothesis by assuming that the cost function does not only depends on the agent's state but also in a number of external features (e.g. local people density, nearby traffic signs). Since the cost function depends on the features, it is possible to compute it even for previously unseen environments, as long as they contain the same kind of features.
Under these assumptions, the problem becomes that of learning the unknown cost function by observing how people move. This is often called apprenticeship learning and, when the underlying planning model is a Markov Decision Process, inverse reinforcement learning.
We have been working on a software library and evaluation testbed for different features and cost-function learning algorithms. We have conducted, in collaboration with the University of Freiburg, a first round of experiments concerning people moving in crowds. The results will be the subject of a submission to the IROS 2014 conference.

We have also been working on an application for intelligent vehicles and ADAS. As a first step, we have developed a ROS interface for the TORCS racing simulator, as well as a road simulation using the same platform (Fig. 7 ). This work has been the product of a collaboration with the Beijing University and IIIT Hyderabad.
Safety applications at road intersections for connected vehicles
Participants : Stéphanie Lefèvre, Christian Laugier.
From a safety perspective, road intersections are the most dangerous areas in the road network. They are also the most complex. Because of the extended situational awareness that they provide, wireless vehicular communications (or Vehicle-to-X communications, V2X) could greatly reduce the rate of intersection accidents. However, numerous research challenges remain before the full use of this technology can be achieved. A PhD was started on this topic in 2009 in collaboration with Renault, and was successfully defended in 2012 [42] . The purpose was to formulate and develop a probabilistic reasoning framework which would allow combining the information shared by the vehicles to estimate the situation and the associated risk as a vehicle negotiates an intersection. The first contribution of the PhD was to model the motion of vehicles using a Dynamic Bayesian Network where the maneuvers of different vehicles influence each other via an “expected maneuver”. This “expected maneuver” represents what a driver is expected to do given the state of the other vehicles in the area and the traffic rules which apply at the intersection. Thanks to the use of a probabilistic framework, uncertainties related to sensor errors and interpretation ambiguities are handled. The second contribution was a novel approach to risk estimation based on the comparison between what drivers intend to do and what they are expected to do. The reasoning is carried out by performing inference on the Dynamic Bayesian Network introduced earlier, using a particle filter. The approach was validated with field trials using Renault passenger vehicles equipped with vehicle-to-vehicle wireless communication modems [41] , and in simulation [40] . The results show that the algorithm is able to detect dangerous situations early and complies with real-time constraints. We also developed a theoretical extension of the model to generalize it to arbitrary traffic situations [29] . This work is still ongoing thanks to an Inria@SiliconValley fellowship granted to S. Lefevre at the end of her PhD. Since January 2013 she is working in the Teleimmersion group at the University of California Berkeley, as a postdoctoral researcher. The research conducted there lead to two new developments on the topic of “Safety applications at road intersections for connected vehicle”.
The first development concerns probabilistic decision making for Collision Avoidance (CA) systems. In the processing chain of a CA system, the “Decision making” module follows the “Risk assessment” module. The research done during the PhD stopped at the “Risk assessment” module, and we now address the challenges present in the “Decision making” module. We identified two main challenges:
-
The first one is that the decision making module has to make decisions based on uncertain knowledge. Sensors provide noisy measurements, digital maps contain errors, and interpreting a vehicle's motion in terms of driver intention is uncertain. These uncertainties propagate to the risk assessment module and to the decision making module, but the latter is still required to make a decision from that uncertain knowledge.
-
The second one is that the timing of interventions is critical. If an intervention is triggered at a time when the uncertainty about the occurrence of a collision is too large, there is a chance that it will end up being a false alarm. High false alarm rates are detrimental to the driver acceptance of safety systems and can lead to the user losing trust in the system. On the other hand, if the system waits until the last moment (certainty about the occurrence of a collision) to trigger an intervention, it might be too late to avoid the accident.
In recent work [20] we proposed to introduce the possibility for a CA system to postpone making a decision. Our objective is to implement the fact that in some situations the new observations obtained by waiting will reduce the uncertainty about the occurrence of a collision, therefore the decision will be more reliable if it is made later using this additional information. The important question to solve is whether the potential gain brought by the additional information outweighs the cost of waiting. In order to answer this question, our decision making approach runs a preposterior analysis to determine the expected value and cost of the additional information. The value of the additional information can be quantified by means of the Expected Value of Sample Information (EVSI). It corresponds to the additional expected payoff possible through knowledge of the additional information and is computed by subtracting the expected costs of deciding with and without additional information. The cost of the additional information is quantified by means of the Expected Cost of Waiting (ECW). It is computed as the difference between the probability that the CA system will be able to avoid the potential collision if it intervenes now and if it intervenes at time t+1. Our decision making strategy is to postpone the decision making process to time t+1 if and only if the EVSI is positive and the ECW is null. The algorithm was tested in simulation at a two-way stop intersection for collision scenarios and no-collision scenarios involving two vehicles. A comparative evaluation with a decision making strategy which does not allow postponing decisions showed that our approach generates fewer false alarms and avoids as many collisions. These results were published at the conference IEEE IROS'13 [20] and a patent application was filed with UC Berkeley [32] .
The second development addresses the relationship between privacy strategies for V2X and safety applications which rely on V2X. User privacy is a requirement for wireless vehicular communications, and a number of privacy protection strategies have already been developed and standardized. In particular, methods relying on the use of temporary pseudonyms and silent periods have proved their ability to confuse attackers who would attempt to track vehicles. However, these privacy protection schemes are not without consequences for safety applications. Such applications make decisions (e.g. warning drivers of an upcoming danger) based on their current estimation of the state of the real world, and this representation is created from the information contained in beacons received from other vehicles. Therefore, interruptions in the transmission of information will impact the decision-making process. If a silent period is scheduled to start at a safety-critical moment, it could result in safety systems not intervening when they should have, namely a “missed intervention”. From a user and safety perspective, this is not acceptable. In this work we address this issue and evaluate the impact of pseudonym change strategies on V2X-based Intersection Collision Avoidance (ICA) system. We use the ICA system developed during the PhD and simulated 3 different privacy protection strategies:
-
The “Fixed ID” strategy assigns a fixed pseudonym to a vehicle for the entire duration of a trip (i.e. a new pseudonym is assigned to the vehicle every time it starts). Testing this case gives us a reference for how well the collision avoidance system performs when there is no pseudonym change and no silent period during a trip, which is what was assumed in our PhD work.
-
The “Baseline” strategy follows the recommendations of the SAE J2735 standard for V2X communications. Pseudonyms are changed every 120 seconds and are followed by a silent period of random duration.
-
The “Adaptive” strategy is a modified version of the Baseline strategy where the risk of the situation is taken into account to decide whether or not a vehicle should be allowed to change pseudonym at time t. It relies on the estimation of the current ability of the collision avoidance system to keep the vehicle on a collision-free trajectory. The idea here is to authorize a pseudonym change and silent period only if it will not affect the performance of the safety application.
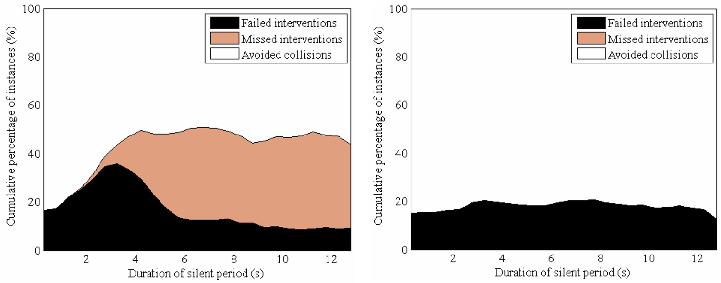
Simulations were conducted using the same simulator and the same scenarios as the tests run during the PhD. The performance of the three privacy strategies was evaluated both in terms of privacy and in terms of successful interventions of the ICA system. The results show that the ICA application requires silent periods to be shorter than two seconds in order to operate correctly in conjunction with the SAE J2735 standard. They also indicate that the addition of simple rules which authorize or not a pseudonym change depending on the context leads to major safety improvements compared to the SAE J2735 standard alone (see Figure 8 ). These results, which were published at the conference IEEE VNC'13 [21] , highlight the necessity of a joint design. That is, the requirements of safety applications should be taken into account when designing privacy strategies, and pseudonym change schemes should be accounted for when designing safety applications which rely on V2X communications. This collaboration is necessary in order to ensure that vehicular communications and safety applications do not neutralize each other, but instead, work together toward safer roads.
|
Guidance for Uncertain shooting domain
Participant : Emmanuel Mazer.
This study is made in collabortion with MBDA (Monsieur Le Menec ) and Probayes (Monsieur Laurent Saroul ) under the ITP framework financed by the british MOD and the french DGA.
From N°51 of Vector Magazine (copyright MBDA) It’s an enduring question facing those in military conflict: ‘when do you pull the trigger?’ However, for pilots in air combat there is an added question: ‘Once you’ve pulled the trigger, when do you break the link with your missile?’ A new answer to that problem was a highlight of the MCM-ITP conference at Lille in May (see Vector 50). Entitled ‘Guidance in Uncertain Shooting Domains’, this joint project between MBDA and French company Probayes has produced a set of algorithms to help a pilot decide when to break a telemetry link. It’s a decision fraught with danger. As pilots approach a target, the longer they keep the link, the greater the chance of their missile finding its target. However, closing in on the target usually means entering the enemy’s own kill zone. So, a calculation of the best trade-off between mission success and pilot safety needs to be made.
“At the moment, when a pilot is engaging an enemy aircraft, he’s obliged to do sums in his head,” explained Graham Wallis, MBDA UK’s Chief Technologist. “What we’re trying to do is to take that away, and hide it behind a probability display.” The problem arises because a seeker’s scanning range is often far shorter than the maximum travelling distance, or kinematic range, of a missile. Though less of an issue at short range, it’s a problem for medium-range weapons – where the target is likely to manoeuvre beyond the initial seeker scan area; hence the need for guidance from the pilot, who may have the target in radar sight.
SUCCESS PROBABILITY Stepping back, there are two sides to the firing equation. As customers require an air-to-air missile that will find its target almost 100 of the time, MBDA provides distance data (known as Launch Success Zone tables) to achieve that. They are understandably conservative. Clearly, though, the final decision to break the datalink can only be taken by the pilot, who is also making mental calculations to minimise his or her exposure to deadly risk. GUSD effectively offers a ‘probability meter’ to help reconcile those two imperatives.
Physically, GUSD could be a display with four bars and the circle of a pie-chart. Each bar represents the probability in percentage terms of an enemy pilot adopting one of four typical behaviours during air combat: flying head-on to attack; turning tail and heading for home, and either turning left or right – along with the probabilities that the enemy has just launched its own missile. The pie chart gives a single percentage – of the MBDA missile’s chances of hitting its target. “The figures displayed are effectively our computer trying to read the mind of the enemy pilot,” said Graham Wallis, whose team also drew on the experience of MBDA’s former air force pilots.
QUICK CALCULATIONS Not surprisingly, the computations behind GUSD are hugely complex. The main input is the realtime radar tracking data of the enemy aircraft, although other elements such as seeker acquisition data, missile dynamics and the missile’s inertial navigation errors are also included. A set of algorithms (and their associated mathematical methods, see box) then process this input – with the three key algorithms covering target behaviour and identification (Hidden Markov Models); the generation of bundles of trajectories (Markov Chains and Monte Carlo techniques) and trajectory collision checking (R-Tree).
Currently at Technology Readiness Level 3, GUSD’s future depends on being incorporated into a programme. The generic data used to date would be replaced by real missile and seeker data, requiring GUSD to move out of the open forum of MCM-ITP and into the area covered by defence secrecy. “Implementation of research and technology is particularly difficult when it comes to jet fighters,” Graham Wallis declared. “But I’m optimistic it will get into a future upgrade of current aircraft, and could even replace the Launch Success Zone tables as a firing cue for pulling that trigger.”
MATHEMATICAL MODELS Named after 19th century Russian mathematician Andrey Markov, the Markov Chain uses a set of rules to predict what will happen next in a situation, when all the variables are known. In a game of bridge, if all the hands were known to all players and they had no discretion over which card to play next, every card laid down could be predicted as a Markov Chain. With a Hidden Markov Model, a player doesn’t know what an opponent holds but can infer that, for example, they no longer have any trump cards because of how they have played their last hand. The Model takes multiple states e.g. ‘Opponent Has Trumps’ or ‘Opponent Doesn’t Have Trumps’ and establishes a percentage weighting of probability to each – which can then be used for a decision over the best card to play. Though it is only an analogy, GUSD’s algorithms use the mass of input data to infer the probability of an enemy pilot’s tactical moves. R-trees are a way of handling multi-dimensional information - in GUSD’s case by using geometric models that drastically cut the computation load.
OTHER APPLICATIONS Even before its own future is decided, GUSD could already lead to a successor MCM-ITP project with Probayes in the area of mission planning for long-range missiles. Called Rapid Mission Planning and Rehearsal, it could automate much of what is currently a labour-intensive process and to provide the customer with different options for mission routes – each with its own probability rating for success.
